Where and when: Thursday, July 29 at 2-3pm in 303S-561
Speaker: Jonathan Kim, PhD student, supervised by Pat Riddle and Joerg Wicker
Abstract: Loop closure detection is an essential tool of Simultaneous Localization and Mapping (SLAM) to minimize drift in its localization. Many state-of-the-art loop closure detection (LCD) algorithms use visual Bag-of-Words (vBoW), which is robust against partial occlusions in a scene but cannot perceive the semantics or spatial relationships between feature points. CNN object extraction can address those issues, by providing semantic labels and spatial relationships between objects in a scene. Previous work has mainly focused on replacing vBoW with CNN-derived features.
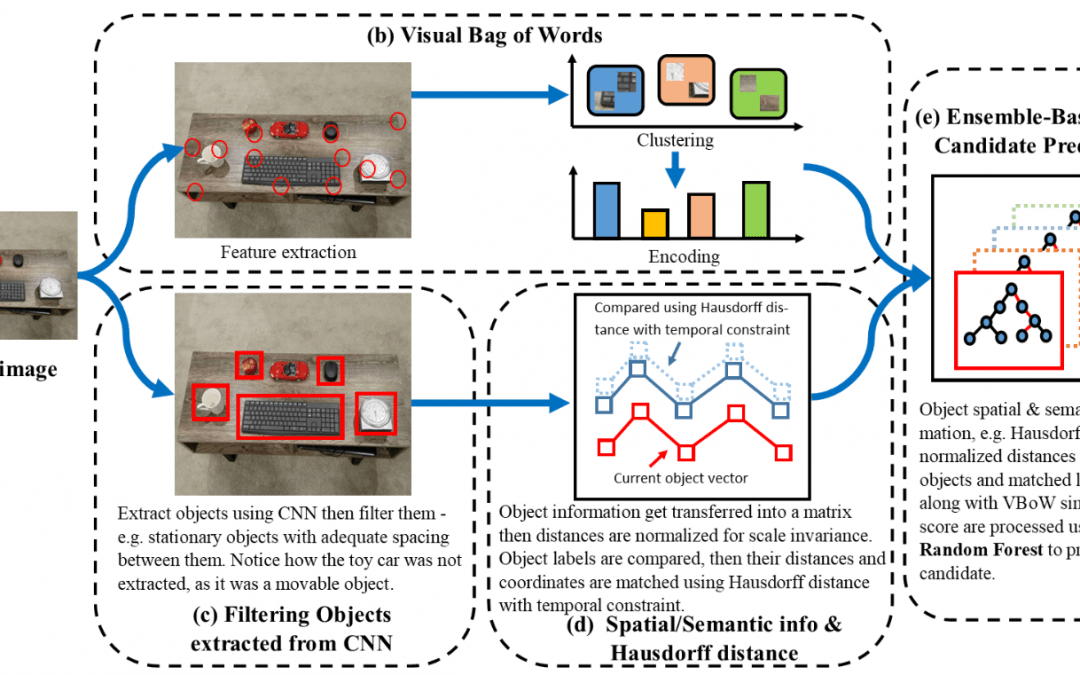
In this paper, we propose SymbioLCD, a novel ensemble-based LCD that utilizes both CNN-extracted objects and vBoW features for LCD candidate prediction. When used in tandem, the added elements of object semantics and spatial awareness create a more robust and symbiotic loop closure detection system. The proposed SymbioLCD uses scale-invariant spatial and semantic matching, Hausdorff distance with temporal constraints, and a Random Forest that utilizes combined information from both CNN-extracted objects and vBoW features for predicting accurate loop closure candidates. Evaluation of the proposed method shows it outperforms other Machine Learning (ML) algorithms – such as SVM, Decision Tree, and Neural Network, and demonstrates that there is a strong symbiosis between CNN-extracted object information and vBoW features which assists accurate LCD candidate prediction. Furthermore, it is able to perceive loop closure candidates earlier than state-of-the-art SLAM algorithms, utilizing added spatial and semantic information from CNN-extracted objects.